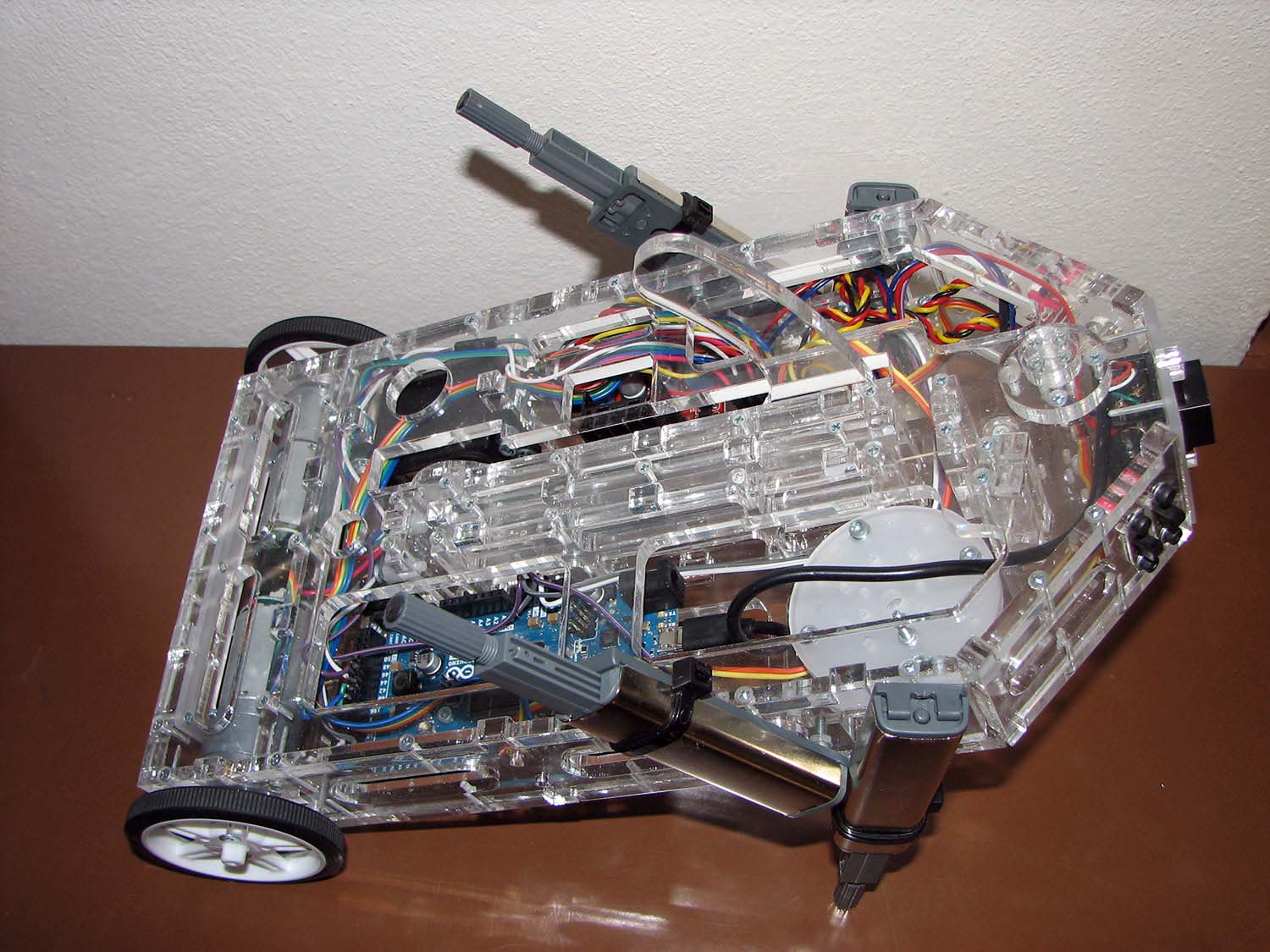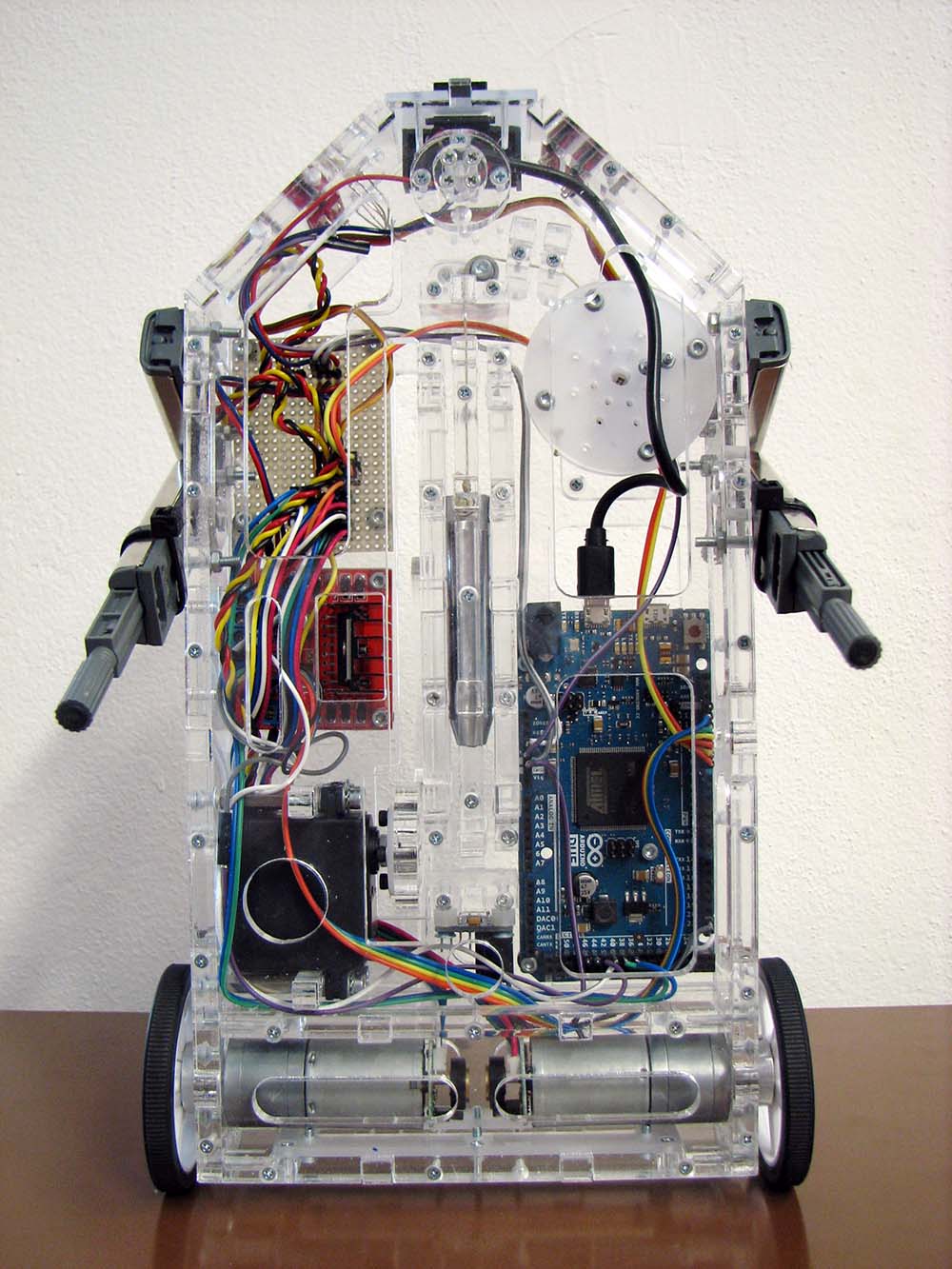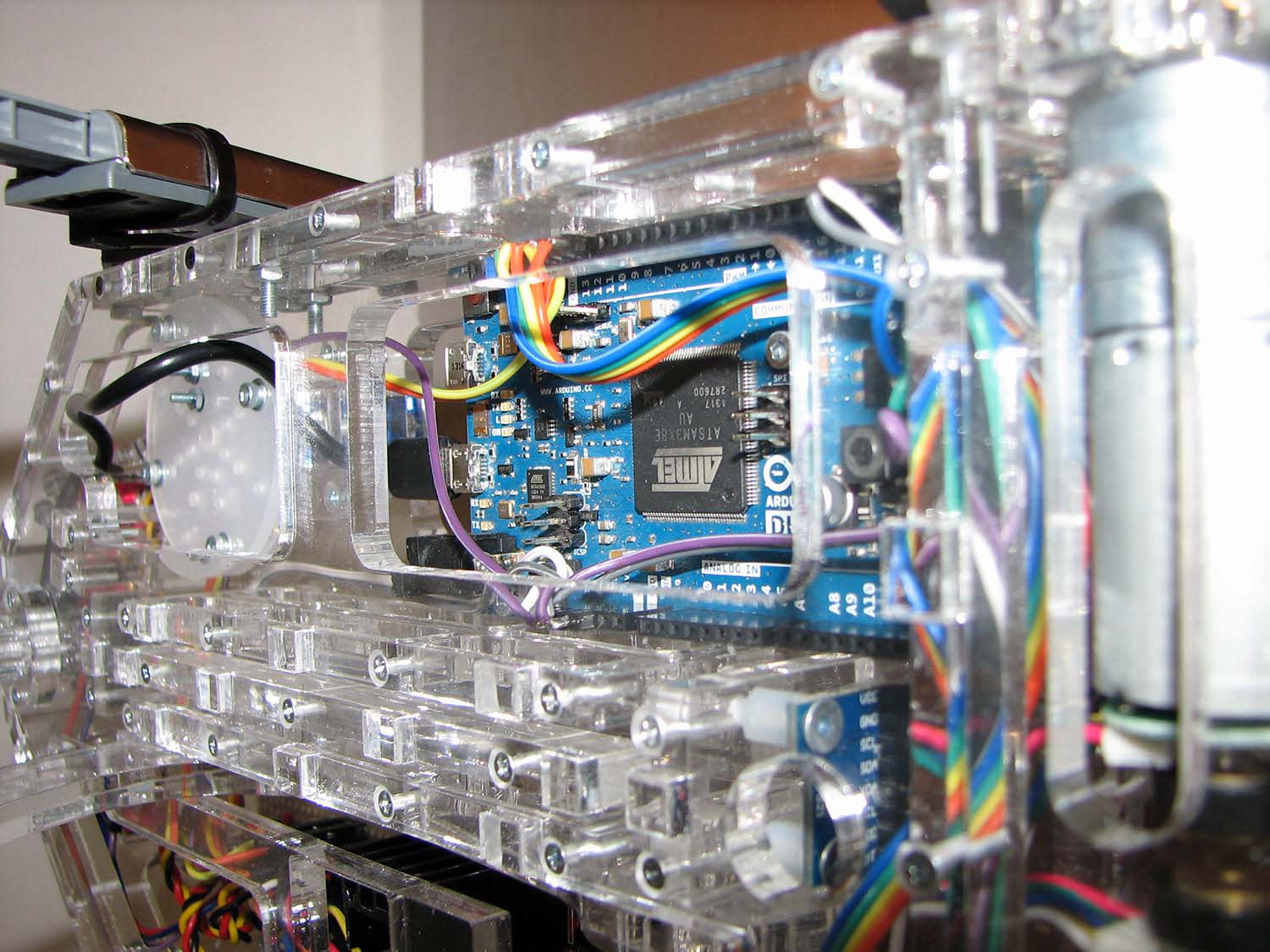

Balancujúci robot pre experimentálne účely
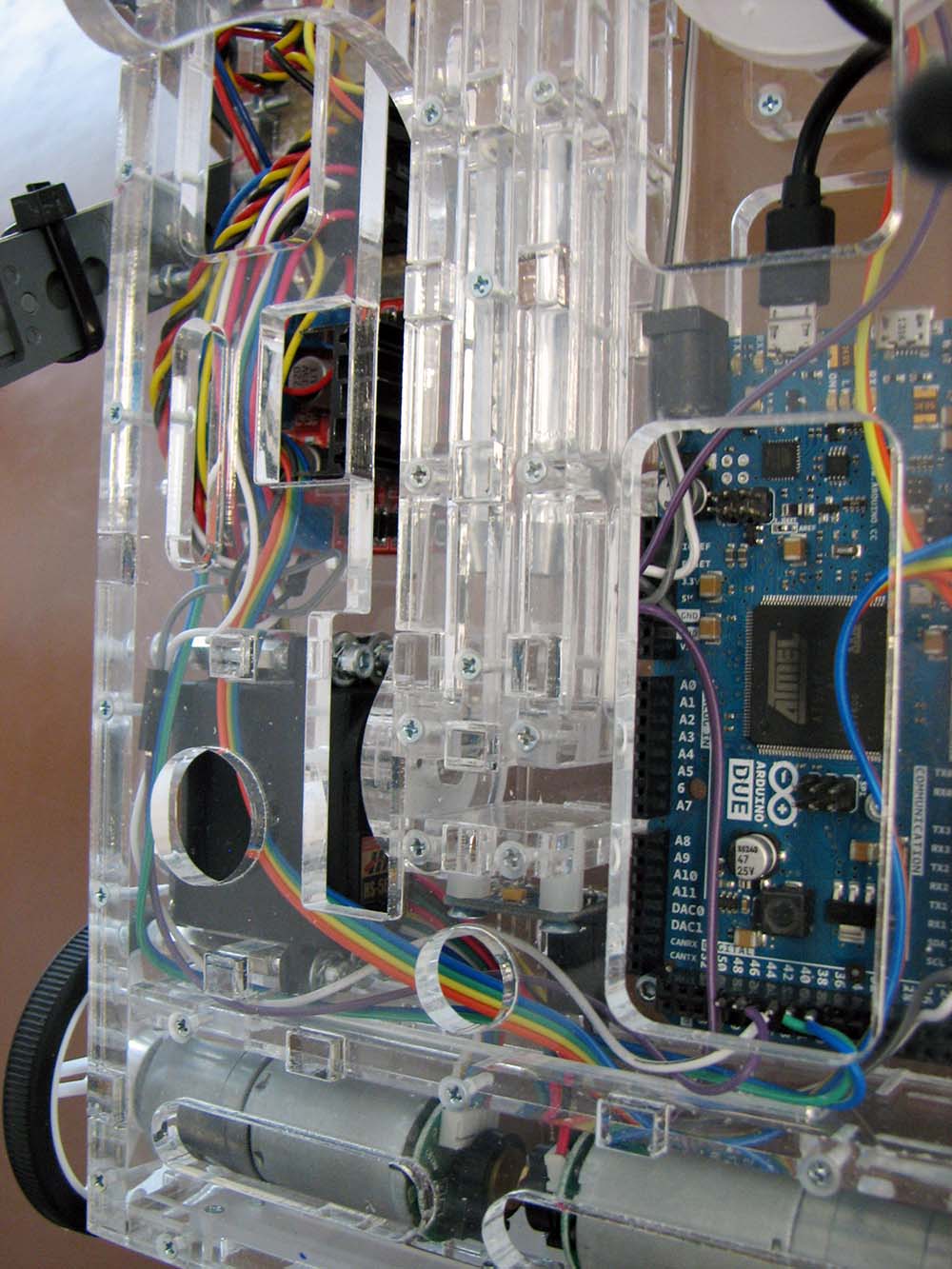
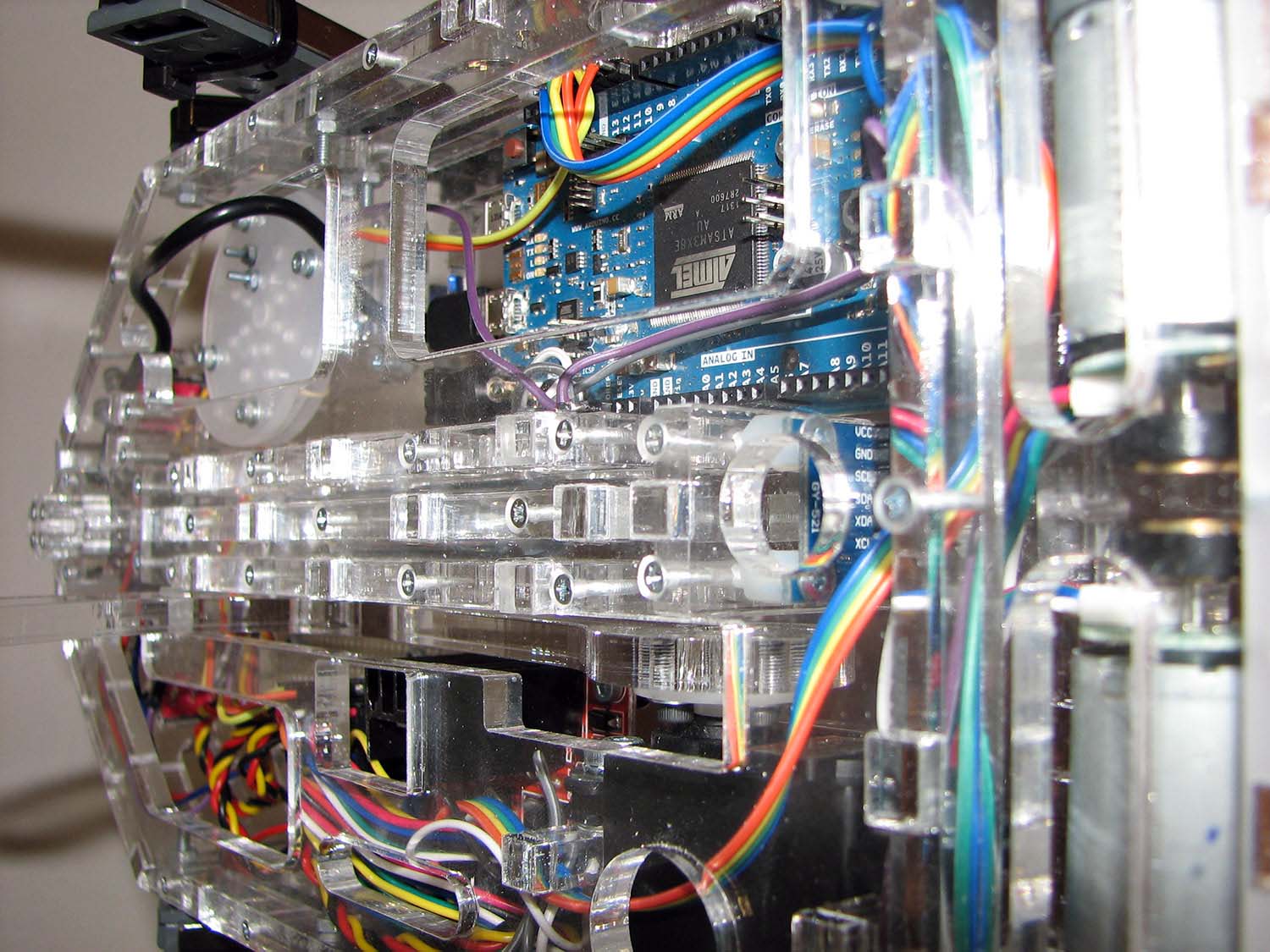
Pre Fakultu elektrotechniky a informatiky STU sme navrhli dvojkolesového mobilného robota, ktorý má študentom slúžiť na experimenty v oblasti riadenia nestabilných systémov. Dizajn robota je priehľadný s otvorenou architektúrou, postavený na platforme Arduino. Špecialitami tohto robota je schopnosť zmeny ťažiska robota počas jeho chodu a automatické zdvihnutie do východzej polohy po páde robota.